- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Voice-Activation Control System for Lower Limb Paralytics
Dana Begun, Amir Javidi, Ari Lax
Introduction
The objective of our project is to design and build a prototype for a voice-controlled therapy
system for lower limb paralytics. Therapeutic protocols are often required to prevent venous stasis.
Deoxygenated blood is assisted against gravity back to the heart in part by local muscle contractions.
With lower limb paralysis, the venous system is denied this assistance and blood flow can slow leading
to thrombosis and clotting which increase risks of embolism and stroke. Additionally, therapies are
concerned with simulating a compressive load akin to that applied during ambulation. This is because
the bone homeostasis system relies, in part, on mechanotransduction of force into osteoprogenitor cellmediated
bone deposition. Without the loading resorption rates can exceed apposition rates, leading to
bone loss and osteopenia-related increase in fracture risk.
Design
Our system uses voice-activation of two motors. The first motor induces a see-saw motion of the
leg with either the knee or hip as the fulcrum. This facilitates venous return flow to reduce risk of
clotting. The second motor applies axial compression to the limb to prevent loss of bone from disuse.
Hardware:
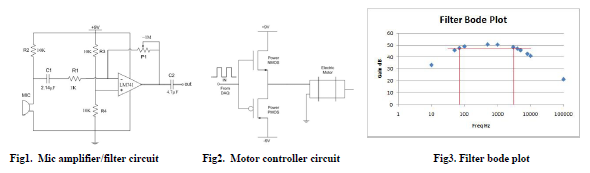
We utilized an electret microphone for acquiring audio signals. To obtain a clear signal an
amplifier/filter circuit was designed. Since beforehand the exact gain of the amplifier was not known we
used a potentiometer to achieve an amplifier with variable gain. Consequently, we were able to adjust
the microphones output volume according to our need. In addition, since the DAQ board was not able to
provide enough current for driving electric motors we utilized NMOS/PMOS power transistors as motor
controller. The filter’s cutoff frequencies were set to 74Hz and 3500Hz to attenuate low frequencies like
60Hz power supply noise and higher frequency aliased signal. The gain of the amplifier is variable up to
1000x. Motor controller’s input is square wave signal from DAQ with 15V
ppk amplitude. It periodically
connects the motor to +9V and -9V causing it to turn clockwise and counter-clockwise. Below are the
circuit schematics and bode plot of amplifier/filter circuit.
Proof of concept:
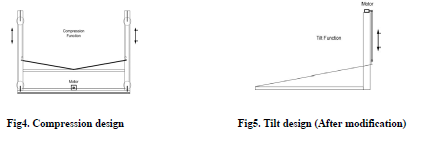
To demonstrate the tilt and compression action through motors we designed the
hardware below. However, the motors we had were not strong enough to pull the pulleys. Therefore, we
removed the pulleys and modified the design by locating the motor on top of the frame as it is shown in
figure 5.
Software:
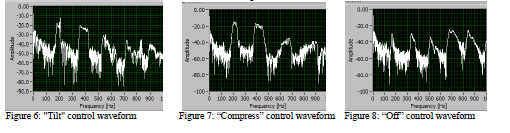
A LabVIEW program has been developed as a speech recognition system to record frequency
patters of the audio input. A noise filter is applied to the input signal. Three control words are defined
with the requirement that they produce distinguishable and reliable waveforms. The words chosen are:
“move” to induce tilt, “squeeze” to induce compression, and “off” to cease all motor movement.
It is apparent that each person has unique vocal patterns. This allows us to specify the system to
an individual’s voice, thus reducing risk of ambient interference. The power waveforms of the three
words are obtained and stored prior to running the system. The LabView VI reads the spectrum files as
the program runs in real time as a basis for comparison.
Frequency spectra are partitioned so each segment has a clear peak. Each partition of the
inputted wave must satisfy the given recorded wave within a reasonable range of variation.

As the program is running in real time, the VI filters the signal the same way and analyzes each
defined partition. The local peak for each partition is indexed. The indices are compared against the
defined known words. If the peak location is within 70% (defined by trial and error) for each range the
VI perceives the pattern as overlapping. If all ranges are satisfied, the associated motion is activated.
We are limited to two motor controls due to the DAQ board’s output connections. The two
outputs, once control word criteria are met, will emit a ±15 Vpp square signal. This will continue until
the “off” control is registered. At this point, all voltage output is ceased. Running the motors requires
more current than the output is capable of. Therefore, we implement transistors to trigger current flow
from an external power source.
Our goal was to develop a proof-of-concept model. In order to do this, we connect the tilt motor
to a simple class 2 lever. Time and funds do not allow the building of the compressor, as well, therefore
this is demonstrated as functional by an LED. To test the efficacy of the design, we run the program
repeatedly and count the number of successful commands and the number of failed commands.
Results
The voice of one group member was recorded for each of the three words. This was to prevent
increased error due to inadvertent tone modulation. The voice was played back repeatedly with a
random combination of words. The acceptance criterion was the initiation of the desired response when
a command word is given. There was an 80% success rate on the tilt and compress triggers. The off
trigger had a 40% success rate and one false positive.
We were able to supply a functioning model of our system and prove vocal control. However,
sensitivity of our system was slightly lacking. A higher success rate (around 90%) would have been
desirable in demonstrating reliability.
Discussion and Conclusion
We have developed a voice-activated system of mechanical stimulation therapy in parapalegics.
The system triggered or ceased motion with verbal command input. The accuracy of our system and its
responsiveness to the user was not optimal. One reason for this is that tests were run in a public room
with a significant amount of ambient noise. Another is that the trigger words were common vocabulary
and may have been inadvertently said by surrounding groups.
Future improvements of our design could help increase sensitivity and specificity in the system.
Better trigger words could be selected to prevent accidental utterance of the word. Additionally, multiple
parameters could be used instead of only peak locality in power spectra. These include width of peaks,
voltage input amplitude, and duration of sound made. These could allow improved specificity but might
decrease sensitivity. These additional parameters could also be incorporated into elaboration of the
model. As of now we have a simple on/off design. With the inclusion of volume and duration it may be
possible to add dimensions to the tasks such as speed.
Overall, the system could allow greater autonomy of individuals with lower limb paralysis. They
would be able to stimulate blood flow and compression without the aid of a nurse or doctor. This also
time and money since these health care providers are able to attend to other issues. Furthermore, it can
reduce occupational hazards for the individuals treating the patient by avoiding repetitive lifting of the
limbs.

Summary: Subsections of the input signal are found. The index of the maximum value is found and
compared to the same value from a known signal by division. If this is less than an acceptable value (.7
in this case) and the maximum is above a threshold it outputs a true Boolean value. If all of those ar
true for a given known signal, another true is output into the signal control.
