- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Overview of what project is:
From home movies to live action cinema a steady picture is always a sign of high quality video. Production studios everywhere have large complex setups to keep their cameras stable while they record masterpieces for the big screen, but that’s out of reach for the hobbyist video maker. Depending on the location those kinds of apparatus may not even be feasible. Wireless drones, for instance, have become a way to capture stunning new video, but due to the nature of their flight, their small size and weight limitations stable video can be quite a challenge.
The camera gimbal has been a unique advancement in video recording. It is an inverse motion device, used to keep the camera steady across as many axes as it supports. Regardless of how the gimbal is handled it seeks to maintain the desired camera position. Precise control algorithms applied to motors in the gimbal’s structure account for changes in the camera’s support and correct for them. Depending on the number of axes these devices can become very complex and expensive, but single and dual access gimbals can be built and designed relatively cheaply. This project was completed to show how dual axis hardware could be combined with NI’s new myRIO. The goal was to produce a relatively inexpensive gimbal thus enabling anyone to get the professional touch they’re looking for.
Picture of project:
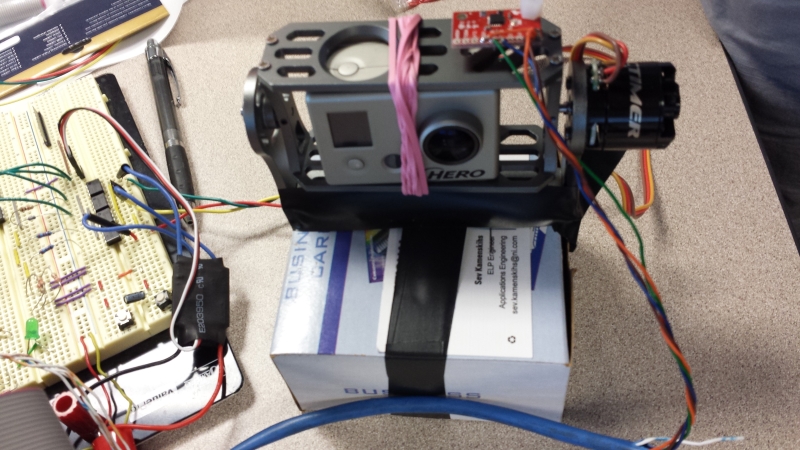
Video of project
Parts List:
Gimbal Frame with motors: http://www.rctimer.com/index.php?gOo=goods_details.dwt&goodsid=872
10A Brushless Motor Speed Controller: http://www.rctimer.com/product_149.html
Solid State Relay (Qty 4): http://www.mouser.com/ProductDetail/Panasonic-Electric-Works/AQV252G/?qs=ZM9KzLiT/SMCdDQ80hqKow==
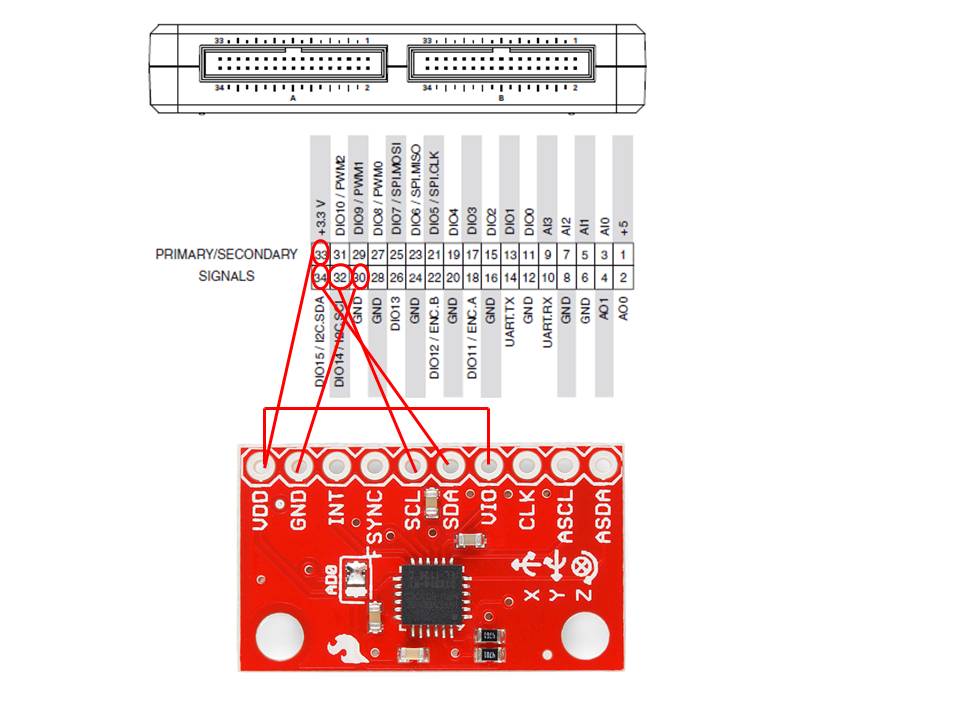
MPU-6050 with breakout: https://www.sparkfun.com/products/11028
I K Ohm resistor (Qty 4)
Power Supply (10V up to 1A)
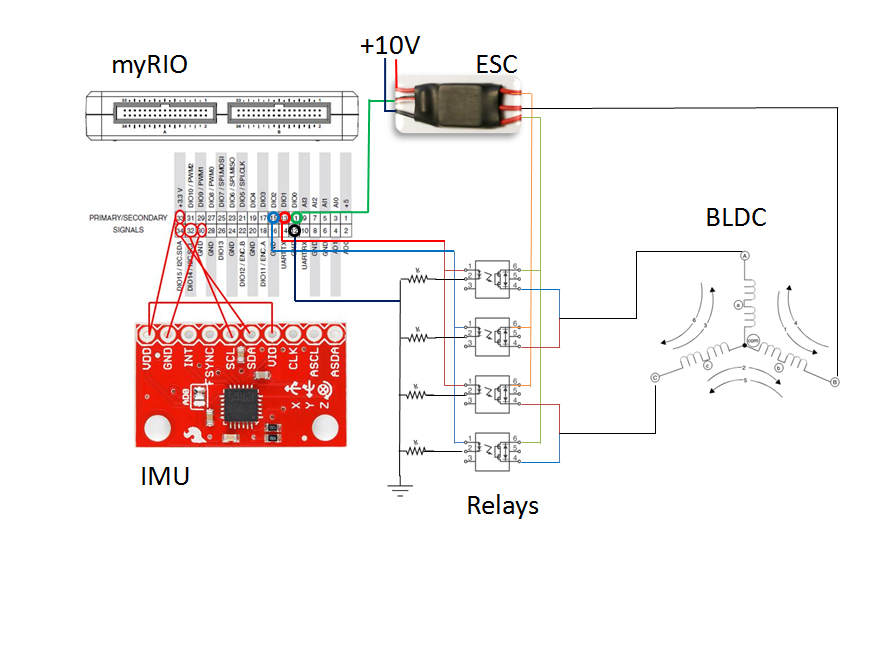
Wiring Diagram: Also attached at end IMU Wiring & Full Diagram Gimbal
Instructions: myRIO GoPro Gimbal.pdf Attached
C or LV?: LabVIEW
Version of LV: 2013
Code: Final Code_myRIO Gimabal.zip
Product Marketing Manager for CompactRIO & TSN
Making the intangible, tangible
{kind=link}
{kind=link}
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hi,
Can you post the code for LabVIEW 12
Thanks
G S Reddy
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hi,
I have posted a back converted version as one of the attachments!
Product Marketing Manager for CompactRIO & TSN
Making the intangible, tangible
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Wow, thanks for the quick post, your documentation was so good, I am already halfway integrating MPU6050 to LM3S8962 arm board by just reading the document
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hi,
There are some missing files like Write Read.vi and etc. I think those are something to do with the I2C communications between the myRIO and the MPU. May I ask where I can find them?
Thanks
Warmest regards,
Lennard.C
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hi Lennard,
This type of question would best be answered on our technical support forums located here: http://forums.ni.com/t5/Academic-Hardware-Products-ELVIS/bd-p/10
Best,
Sunaina
Product Marketing Manager for CompactRIO & TSN
Making the intangible, tangible
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hello Sunaina,
Thank you for posting your code! It has been a huge aid in jumpstarting a project that I have been working on trying to determine velocity and displacement of an object using the MPU6050. I was hoping that you might be able to answer a question about the timing of the while loop for collecting the sensor data. I would like to take samples of the data from the filtered x & y signals and integrate them with respect to time but I'm having difficulty trying to accomplish that goal. Do you know of a good way to determine the time it takes to execute that loop? I have already tried the time domain math but I'm beginning to think that a timed while loop might be a better option.
Any insights that you have would be greatly appreciated!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hey!
This type of question would best be answered on our technical support forums located here:http://forums.ni.com/t5/Academic-Hardware-Products-ELVIS/bd-p/10
Best,
Sunaina
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
thanks for share!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hi all,
Am currently trying to understand the technicalities of using myrio to control the GIMBAL for this project. Would there be any kind soul that is based in Singapore whom I can seek to understand how to construct the project from scratch?
