Omni directional Robotic arm & Live Surveillance
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Code and Documents
Attachment
Overview
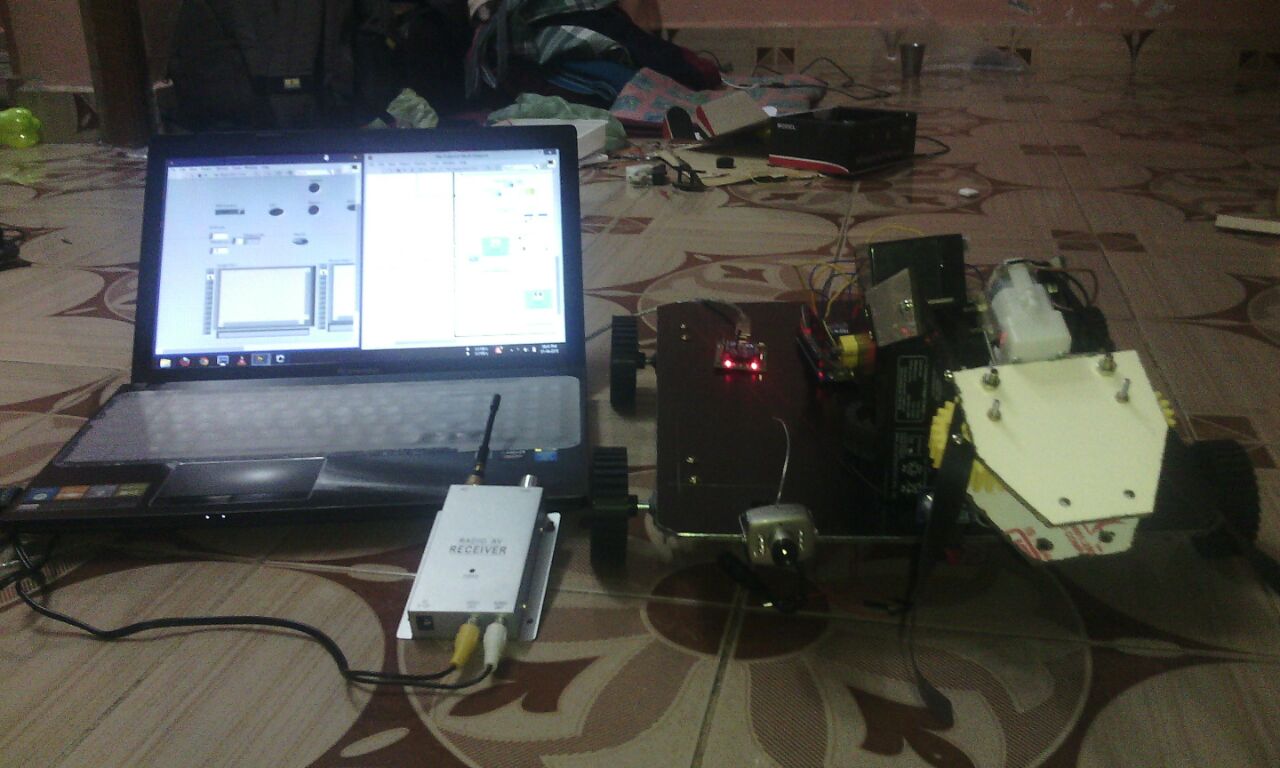
This project is titled as Omni directional robotic arm & Live Surveillance for the purpose of pick and place and monitoring of the behavior, activities, or other changing information. which is to be constructed on hardware and software. This proposed project is to build a robotic arm that is capable to pick an object through the sensor attached to it and place the object accordingly to the coordinated places and also The wireless camera installed in the robot acquires the video which is transmitted to the user end and interfaced to the LabVIEW. The captured videos are processed for edge detection and saved using LabVIEW. The Ultrasonic sensor are used to detect the Obstacle distances.The system that will be build will be divided into four parts : Arduino mega circuit, driver circuit,wireless camera and ultrasonic sensor. These systems will be powered by 12v battery. To create a systematic, faster and efficient operation microcontroller ATmega2560 will be used. This microcontroller will function to process the input received from the keyboard through the usb cable and perform the corresponding action.
Description
Connect the DC motors to driver circuit,and input pins to Arduino pwm digital pin as in labview block diagram given below
and i use ultrasonic trigger input in arduino digital pin 36,echo pin 37.
- Open arduino software and upload the LIFA_base.ino program then open labview file given below.
- Select arduino port in VISA resource.
- And camera in session in.
- And run program.
select default name and path to save vid and click ok
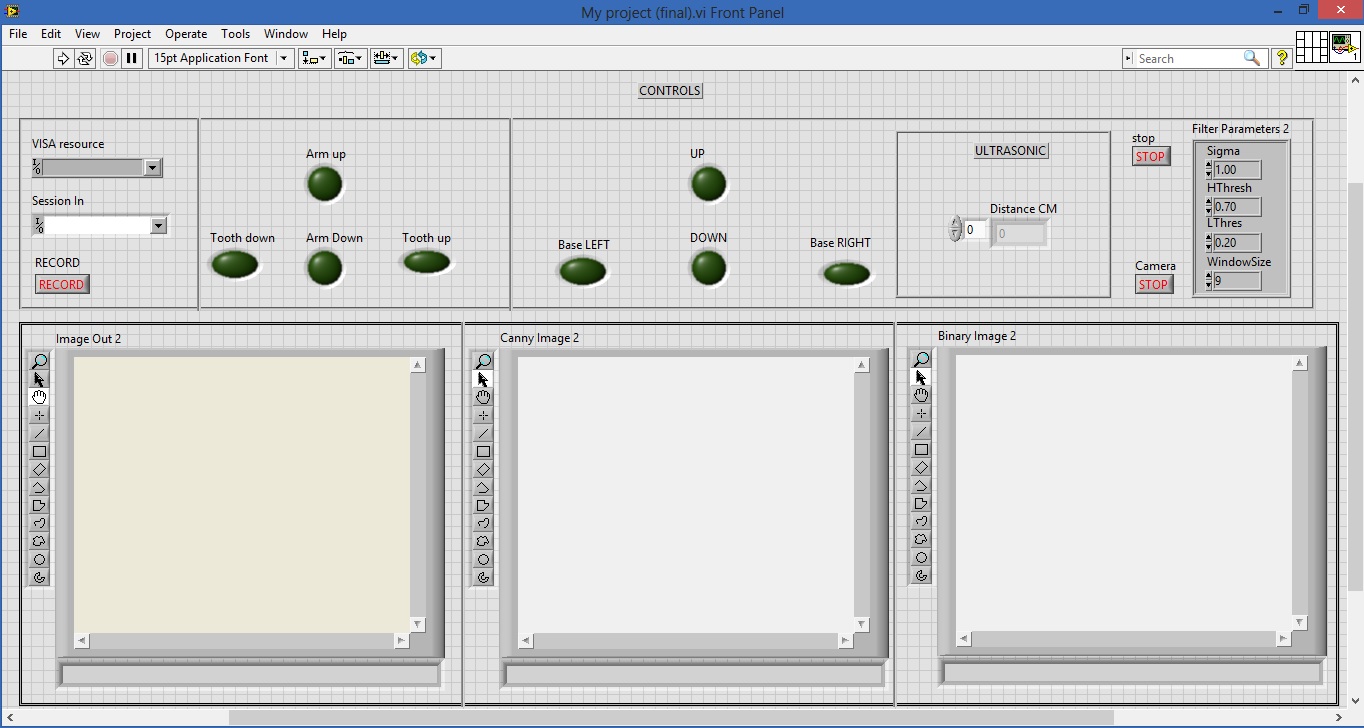
Keyboard controls:
- (up and down) - robo base move to forward and backward movement.
- (left and right) - arm base left and right turn.
- (w,s) - for arm up and down.
- (a,d) - tooth Open and close.
click record video and stop to save video.the video saved in avi format that u have choose the default path when program run
Steps to Implement or Execute Code
- Install labview in system.
- install Arduino IDE software in system.
- install vi package manager and download labview interface for arduino(LIFA).
- and upload lifa program to arduino board the lifa program is given below in LIFA_base.rar
- Uncompress the rar file and open LIFA_base.ino in Arduino ide software.
- and run the vi file.
Requirements
Software:
- LabVIEW
- Arduino IDE
- VI Package Manager(VIPM)
Hardware
- Arduino Mega 2560
- Robotic Arm
- DC Motors 150 RPM
- Wireless Camera
- Ultrasonic Sensor
Additional Images or Video
Front Panel:
Example code from the Example Code Exchange in the NI Community is licensed with the MIT license.
