From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
Competition Year: 2016
University: University of Manchester
Team Members (with year of graduation): Thomas Shearwood (2017), Dimitrios Tsounis (2016), Fuad Yusifli (2016), David Whitehead (2017), Stuart Philips (2016), Ismaeel Ramzan (2017) (All students are with the UAV Society of the University of Manchester)
Faculty Advisers: Dr Andrew Weightman, Dr Mostafa Nabawy, Dr William Crowther
Email Address: thomas.shearwood@student.manchester.ac.uk
Country: UK
Title: Samaritan – An Unmanned Aerial Vehicle for Humanitarian Aid Missions
Description: Samaritan is an autonomous Unmanned Aerial System (UAS) that can be used by Search and Rescue (SAR) teams for information retrieval and monitoring of disasters zones and the delivery of critical humanitarian aid, in the event of ground infrastructure interruption. The information collected by the UAS can be relayed in real-time to local Command and Control (C2) SAR centres. Samaritan can complete the entire mission autonomously, without the need for a trained human pilot, thus helping SAR teams reach survivors faster. An added advantage of the UAS is that the life of human pilots is not put in danger, thus making it ideal for use in high risk situations (e.g. adverse weather conditions, nuclear accident, etc.).
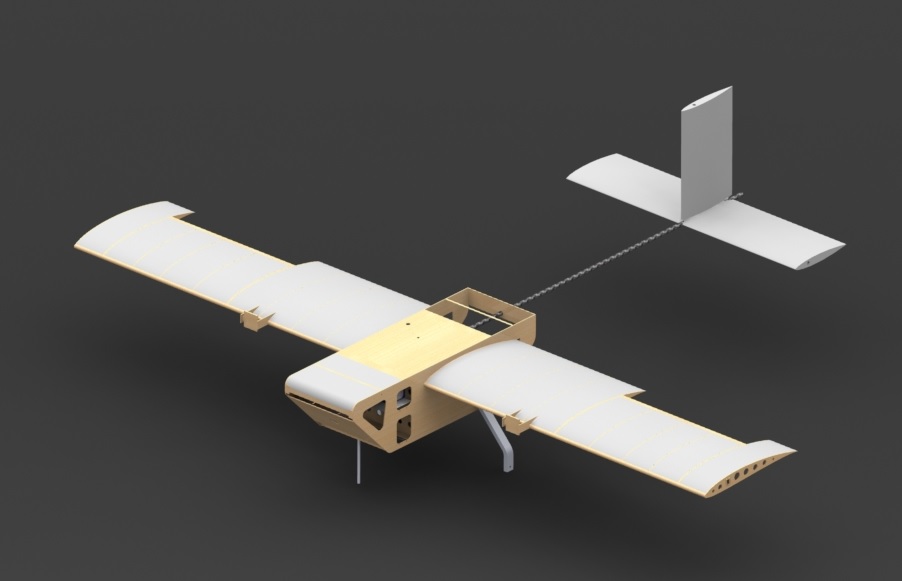
Figure 1: Samaritan UAS
Products:
NI Hardware
myRIO-1900
NI Software
LabVIEW 2015
myRIO toolkit 2015
Other Hardware
Pixhawk Autopilot
3DR uBlox LEA-6H High-Performance Receiver (GPS)
LIDAR-Lite 2 Laser Rangefinder (PulsedLight)
Generic USB webcam
2x E-flight Power 10 motors
2x Aerostar 60A Advanced Electronic Speed Controller (ESC)
Batteries
Servos
The Challenge:
On Christmas day of 2004 one of the deadliest human disasters took place in the Indian Ocean; The tsunami that followed an earthquake with a seismic magnitude of at least 9.1, killed over 230,000 people and many more thousands were injured. Additionally, over half a million people were displaced in Indonesia alone because they lost their properties [1]. A few years later, in 2011, the Great East Japan Earthquake killed thousands of people and caused the largest nuclear accident since Chernobyl.
It is evident that natural disasters will occur, no matter how advanced our civilisation is. However, as technology evolves, we have the ability as a human race to better respond to those situations. Locating and reaching survivors in a short time after an incident is of paramount importance to Search and Rescue (SAR) teams [2]. Furthermore, as in the case of the 2004 Tsunami, there is a need to establish a lifeline of humanitarian aid for people who were displaced from their properties. Sometimes, SAR efforts and humanitarian aid are delayed by the interruption of the ground infrastracture. Hence, we need a technology that will allow SAR teams to reach disaster zones via other means.
The initial idea for this project was provided by the UK IMechE UAS challenge, where teams of students were set the task of developing a UAS cabable of delivering a 2kg payload of humanitiarian aid to a predefined drop zone. However, as the project evolved the entire team began to realise the impications that the developments made during this project could have on allowing disaster relief teams to utilaise the benefits of an aeriel platform without the need for a trained pilot.
The Samaritan UAS is our answer to this problem. Samaritan was developed for the UK IMechE UAS Challenge, which invites students to develop a fully autonomous UAS that is able to deliver a 2kg payload of humanitarian aid to a predefined dropping zone.
Beyond the humanitarian purpose of the UAS, a technical challenge that the Samaritan UAS addresses is the standardisation of the interface between the Pixhawk autopilot and the myRio. Pixhawk is one of most popular open source UAS autopilots. Implementing off-board control with the Pixhawk and another computer is a non-trivial challenge, which has no formal solutions or proper documentation. Our team has developed a fully functional solution and is planning to open source the software and hardware setup so it can be used by other research organisations and SAR groups.
The Solution:
Aircraft:
The team has designed and is manufacturing the Samaritan UAS, which is seen in Figure 1. Multiple concepts and design options were considered and trade studies conducted to select the optimal configuration. The UAS was designed with flexibility in mind, allowing the platform to not only perform adequately in the competition, but also be easily adapted to a wide range of similar applications. For example, the payload bay could be quickly reconfigured from carrying a humanitarian aid to carrying an infrared camera for searching for survivors buried in rubble.
Scalability and modularity are ideas that the team considered during the design stage of the UAS. For example, although the current version of the UAS is optimised for the IMechE Challenge, a scaled-up version of the same fundamental design can quickly be produced by varying the initial design requirements. Additionally, the current payload bay contains two bags of flour (2kg in total), as per the competition requirements. However, the payload bay does not form part of the permanent structural design of the aircraft and be easily changed for a different payload. This modular design of the Samaritan UAS will enable SAR teams to change payloads within a few minutes and fulfil different missions.
The Samaritan UAS has an empty mass of 4kg and the Maximum Take Off Mass (MTOM) is 7kg. Two E-flite Power 10 brushless motors power the UAS, each producing up to 400W of power. The primary battery source is 3-cell 8000mAh Lithium Polymer battery, which powers both the propulsion system and the avionics. Samaritan can operate in light rain and in wind gusts of up to 25 kts.
Avionics:
The solution chosen was to utilise the myRIO along with the Pixhawk autopilot system. The Pixhawk is a commercial off the shelf solution which has been used in many previous projects to control aircraft designed by the UAV Society. Whilst the capabilities of the Pixhawk have been proved during the airborne flight phases, a limitation of the system is there is currently no method of autonomous take-off and landing.To overcome this, the myRIO was connected into the input of the Pixhawk, allowing easy development and testing of proprietary control laws using LabVIEW; this allowed the team to be sure of how the aircraft would behave during the critical flight phases of take-off and landing.
The technical challenge was to create a system which allowed two-way communication between the Pixhawk and myRIO to allow the control laws to be effectively implemented. By using LabVIEW’s native functions for serial communication on the myRIO, the telemetry data from the Pixhawk could be easily read into LabVIEW and easily decoded using the data manipulation tools. This allowed the control laws implemented on the myRIO to make use of the sensor data from the Pixhawk, removing the need for duplication of sensors. Creating a method for controlling the Pixhawk was more complicated.
To control the aircraft, the myRIO was placed between the receiver and Pixhawk so that the control data produced by the control laws could be fed directly into the Pixhawk. In order to accomplish this, the myRIO needed to be capable of producing the same signal as the receiver which in this case uses the Futaba SBUS protocol; this is a UART signal transmitted at a baud rate of 100kHz. To mimic this signal, the capabilities of FPGA to handle large volumes of IO data were utilised by constructing a custom FPGA personality to communicate with the Pixhawk at this non-standard baud. By using the combination of real-time processing for the control laws and FPGA for signal manipulation and IO offered by the myRIO, this method of control could be effectively implemented.
Figure 2: Testing using Acrylic bird
By using the IO functionality of the FPGA additional sensors and features to overcome the challenges met during the development to be added in a modular manner; this means that if this code is utilised for future vehicles, features can be easily added and removed depending on the mission requirements. For example, in this project two additional features where added to the system: Firstly, a laser range finder which communicates the aircraft’s altitude above ground level using Pulse Width Modulation (PWM) was added to improve the reliability of the landing control law. Secondly, it was found that the system was difficult to tune for directional control at both low and high speeds; to overcome this the FPGA was used to monitor and manipulate the yaw and throttle signals in order to implement differential thrust, something which is not achievable using the Pixhawk alone.
Figure 3: Poster
We would like to nominate Dr Andrew Weightman for his help and support during this project and for first introducing us to LabVIEW. By using the skills tought as part of his unit to develop flight control for quadcopters using LabVIEW, the idea of using LabVIEW for a full fixed wing flight control was developed. He has been a source a guidance throughout this project both in his knowledge of LabVIEW but also helping to arrange for facilities and materials to make this project possible.
[1] Rofi, A., Doocy, S. and Robinson, C. (2006). Tsunami mortality and displacement in Aceh province, Indonesia. Disasters, 30(3), pp.340-350. Available at: http://www.jhsph.edu/research/centers-and-institutes/center-for-refugee-and-disaster-response/public...
[2] Doherty, P. & Rudol, P., 2007. AI 2007: Advances in Artificial Intelligence: 20th Australian Joint Conference on Artificial Intelligence, Gold Coast, Australia, December 2-6, 2007. Proceedings. In M. A. Orgun & J. Thornton, eds. Berlin, Heidelberg: Springer Berlin Heidelberg, pp. 1–13.Available at: http://dx.doi.org/10.1007/978-3-540-76928-6_1.
Bravo! Fantastic project, with a noble goal.
Q1. Have you actually launched the UAV yet? Do you have photos or (even better) videos of the UAV in action... in the sky?
Q2. the IMechE UAV Challenege is in July, right? Are you guys competing this year? Feeling confident?
Regardless, congratulations on a great project.
