Introduction
For an inter-office NXT competition, I was tasked to build a robot that could grab an object from the field and then place it in the scoring area. I ended with a robot that could go and search for an object and return to homebase (which I could then touch the robot, as per our rules) and then point it towards the scoring area to drop the ball.
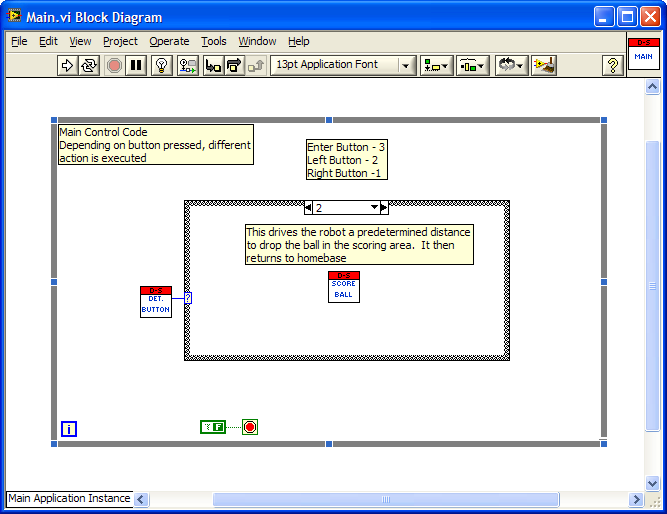
I ended up with some pretty simple NXT code, but it will showcase some of the Beta NXT Module. I present Daniel-san (homage to the Karate Kid)


Additional Notes
The robot works by:
- Waits for user input to determine whether to get the ball or score the ball
- Upon completion of a task, a sound file is played to show that it's "The Best...Around!"
- Uses the built-in encoder to determine distance traveled and to help return the robot to homebase
- A sonar sensor determines the distance of the robot to the object and a light sensor determines if an object has been acquired by the claw.
I would include a picture of the robot, but it was dismantled to be used for Lego Mentoring. Stay tuned for more NXT Module Code!
