概要
モータが正転から逆転、もしくは逆転から正転に転じた時、そこまでどれだけ正転していたか、逆転していたかを知りたい場合があるかもしれません。そんな時はこちらのVIのような実装方法はいかがでしょうか。
詳細
基本的な関数を組み合わせて、回転方向が切り替わった瞬間を検知し、検知した瞬間にどれだけ回転したか計算できるようになっております。
実装・実行方法
1. VIを動かした後、正転?ボタンを押しますと、正転、逆転が入れ替わり、位置情報の増加、減少が切り替わります。こちらがエンコーダから出力された位置情報を擬似的に再現しています。
2. 正転と逆転が切り替わりますと、その瞬間の位置情報の値が配列①に順々に記録されていきます。
3. 正転と逆転の切り替えが複数回行われますと①の配列情報より、どれだけ正転、逆転したかを算出し、配列②に表示します。
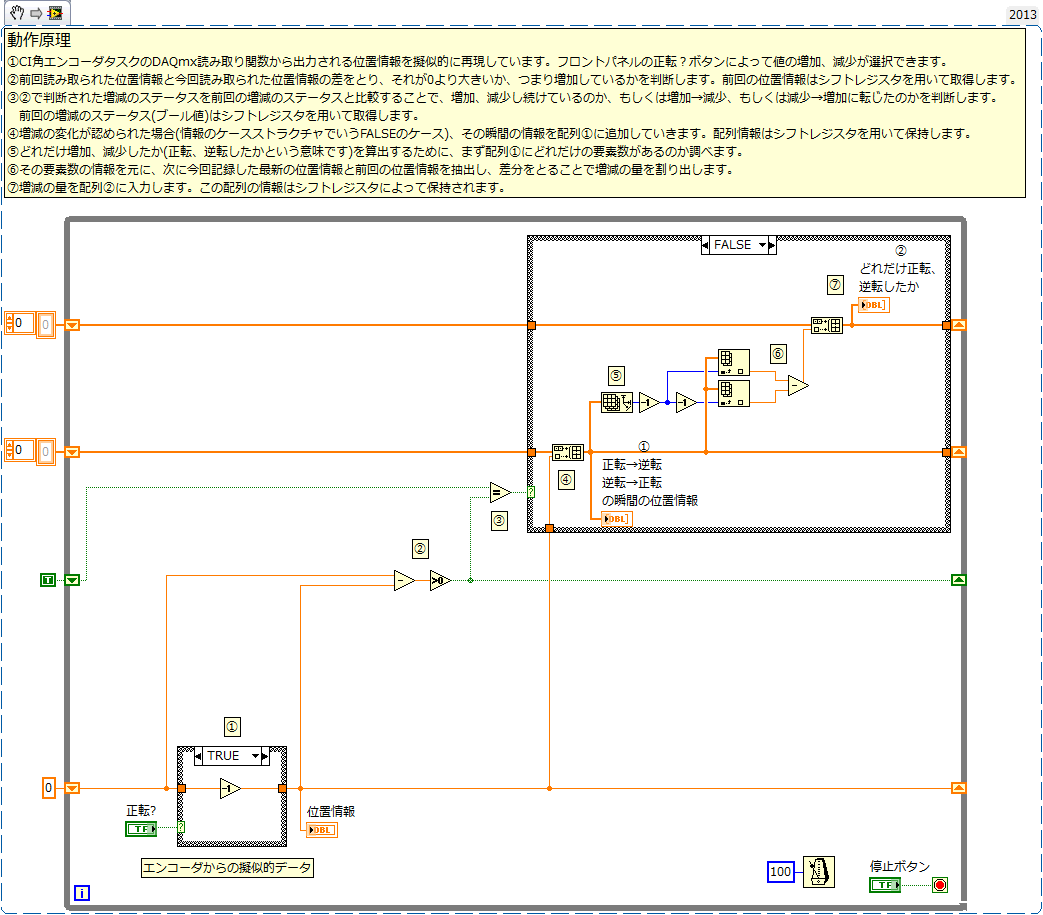
4. 実際の動作原理に関しましては、ブロックダイアグラム上の説明をご覧ください。
必要なもの
ソフトウェア
LabVIEW2016
もしくは
LabVIEW2013以降
ハードウェア
無くても動作原理は確認できます。
実際にエンコーダを実装する際には、カウンタでCI角エンコーダタスクに対応しているモジュールを使用してください。
VIスニペット