- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- « Previous
- Next »
[ask] newbie
07-02-2014 08:17 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
pasti harus unik.
ya, secara teori akan dilock terus, kalau terhalang tentu akan mencari objek yang mirip. Setahu saya ada scoringnya, mulai dari 0 sampai dengan 1000 (mirip sekali).
Certified TestStand Developer (CTD)
Using LabVIEW 8.5.1 (2008) to LabVIEW 2024
07-02-2014 11:31 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
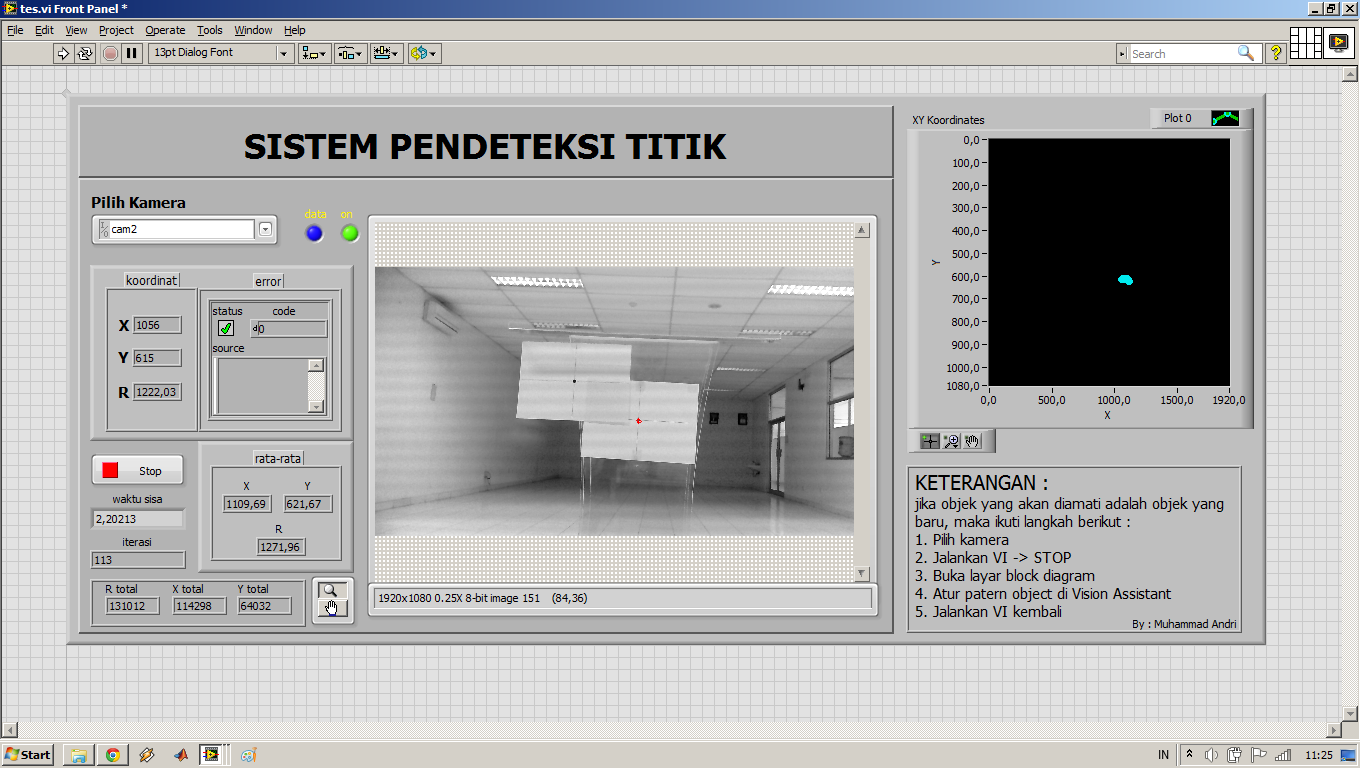
saya menggunakan Modul Vision 2013 mas Krisna, ada object tracking disana.
awalnya ketika saya menggunakan objek tracking titik berhasil terdeteksi seperti pada gambar dibawah.
tapi ketika saya beri gangguan pada titik tersebut (saya tutupi titiknya beberapa saat, lalu saya lepas lagi), titik yang diamati tidak terdeteksi dan koordinat serta Resultan titik tersebut menjadi NaN. seperti pada gambar ini mas Krisna.
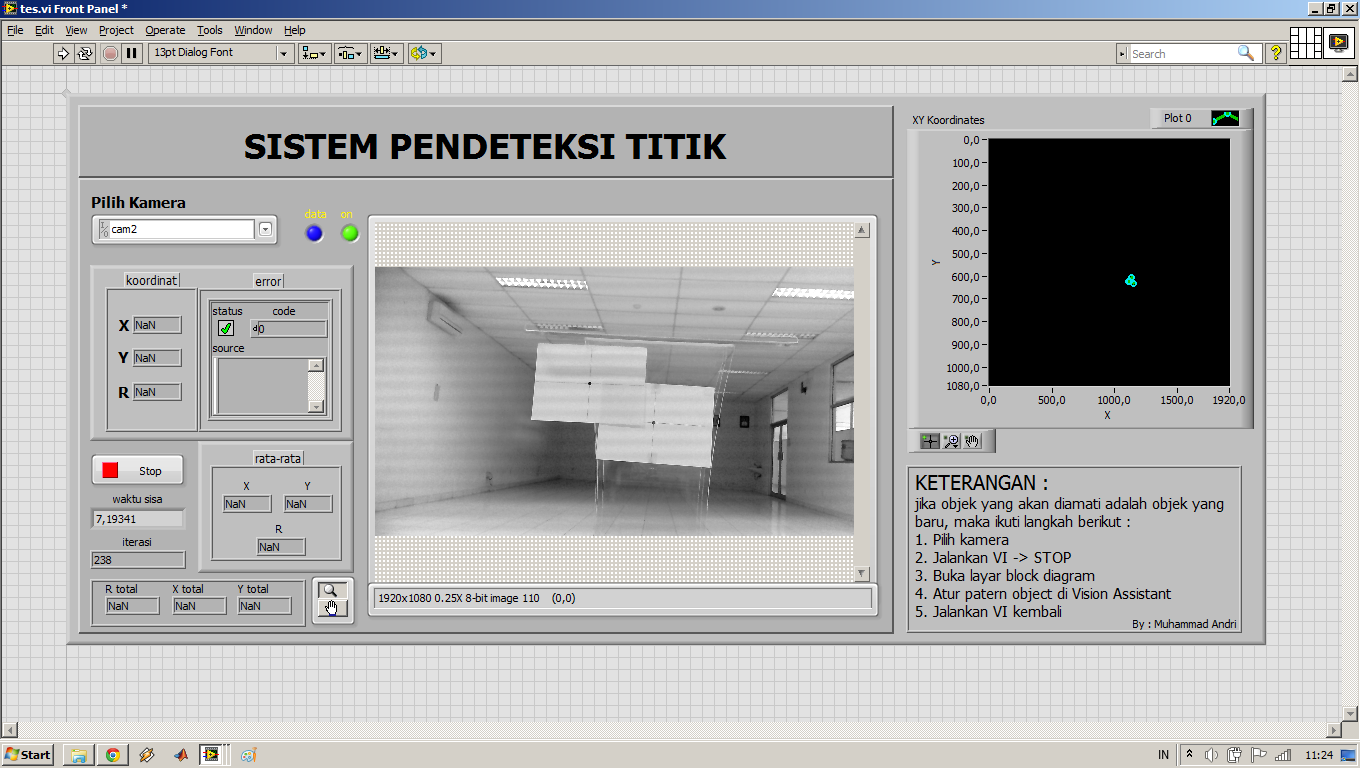
oiya, saya juga membuat ada 2 titik untuk perbandingan mas, ketika diberi gangguan apakah pindah ke titik sebelahnya atau tidak. dan ternyata tidak.
terima kasih dan mohon bantuannya mas Krisna 
07-03-2014 12:29 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
mas Andri, pertama, ini saatnya kita bicarakan resolusi kamera melawan FOV (Field of View). Saya rasa algoritma object tracking atau pattern matching tidak maksimal karena pixel yang merepresentasikan objectnya tidak cukup banyak.
Mode yang dipakai Video atau Image? Kalau Video saya lihat cuma 2MP.
Kedua, template-nya saya sarankan jangan titik lingkaran, tapi yang lebih unik seperti + atau simbol.
Certified TestStand Developer (CTD)
Using LabVIEW 8.5.1 (2008) to LabVIEW 2024
08-13-2014 10:09 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
terima kasih sebelumnya mas krisna, maaf saya mau tanya lagi mas. saya telah selesai menguji 2 objek, yaitu lingkaran dan kotak persegi. ternyata lingkaran lebih stabil untuk di tracking dibanding kotak persegi.
yang saya mau tanyakan adalah bagaimana ya cara untuk merubah jarak pixel dari gambar yang ditangkap menjadi jarak dalam cm pada sebenarnya
setelah saya ukur 1 cm di sebenarnya = 15 pixel yang ada pada gambar yang tertangkap.
terima kasih dan mohon bantuannya mas.
08-20-2014 07:21 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
ngeliat gambar di atas jadi mau ngeluarin pistol 
1. kalau lingkaran lebih stabil dari pada kotak persegi berarti ada yang salah disetting sampeyan. Secara teori, harusnya sama. Coba lihat, apakah pattern matching disetting untuk mencari "rotated pattern" kalau iya, ada settingan, berapa min dan max nya. Tapi meng-enable fungsi ini ada resiko, algoritma menjadi lebih lambat. Kalau menggunakan pattern lingkaran juga ada resiko, tidak diketahui apakah objek ini ter-rotasi atau tidak. Pada intinya hidup ini memang penuh resiko, tinggal pilih mana yang paling logis (nah lo, melenceng...)
2. 1cm=15 pixel itu sebenarnya jelek mas. Tapi ya itu pengalaman saya di industri ya. Biasanya kalau saya mau dapat resolusi 1mm dari pengukuran vision, minimal, paling minimal, 1mm harus diwakili oleh 2-5 pixel, tapi aplikasinya saya gunakan 10pixel. Jadi resolusi sampeyan di atas bisa dapat akurasi sekitar 0.5cm. Ini ada artikel yang worth to read:
http://digital.ni.com/public.nsf/allkb/1948AE3264ECF42E86257D00007305D5
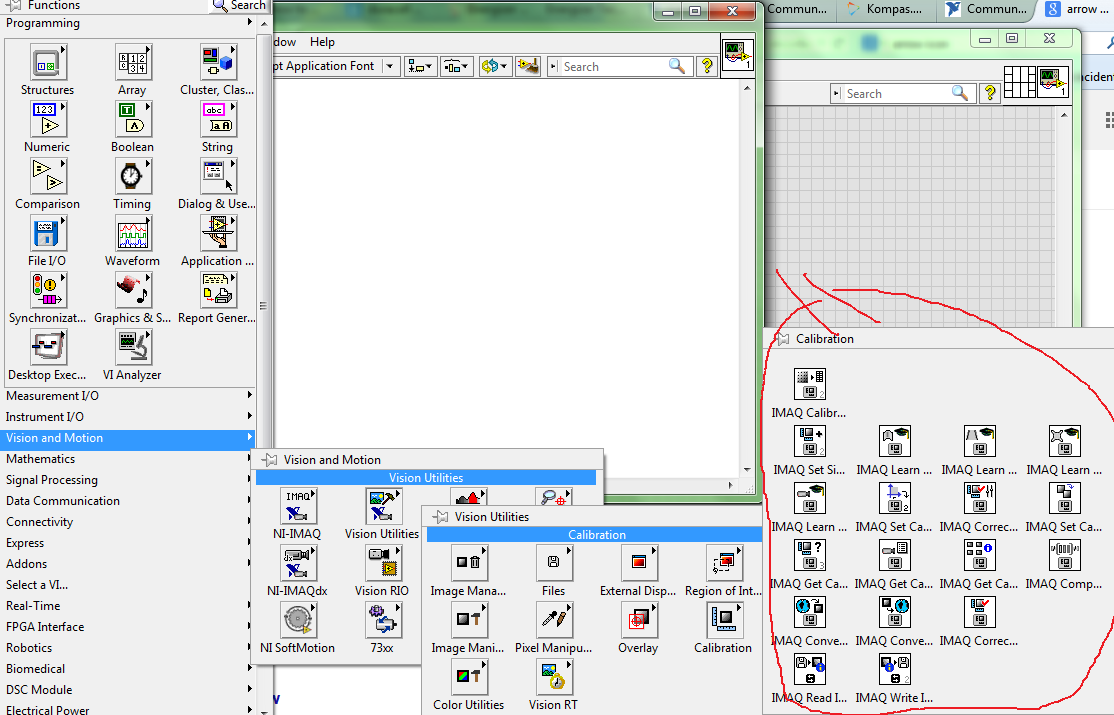
Cara kalibrasi bagaimana? Sampeyan pakai LabVIEW atau VBAI? Keduanya, bisa cari fungsi Calibrate.
3. Kepo sedikit, kenapa ga pakai pattern seperti tanda panah:
Lebih enak karena unik secara sudut jadi bisa ngukur sudut kalau perlu
Certified TestStand Developer (CTD)
Using LabVIEW 8.5.1 (2008) to LabVIEW 2024
- « Previous
- Next »
