- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
(Make sure you follow all the 3 steps involved in submission. This is only Step 2 of 3. For details, visit http://bit.ly/16iNfUL)
Contact Information
Name of the College : Hindustan Institute of Technology & Management, Agra
Name of the Team Members along with their respective current semester : sudhanshu khare (8th semester) & shefali khare (6th semester)
E-Mail Address & Phone Number of the Team Leader : email- sudhanshu.khare26@gmail.com & phone no. - 09452097120
Name of the Faculty Guide : Mr. Ashish Chandiok
E-Mail Address & Phone Number of the Faculty Guide :email- achandiok@gmail.com & phone no. - 09837761031
Project Information
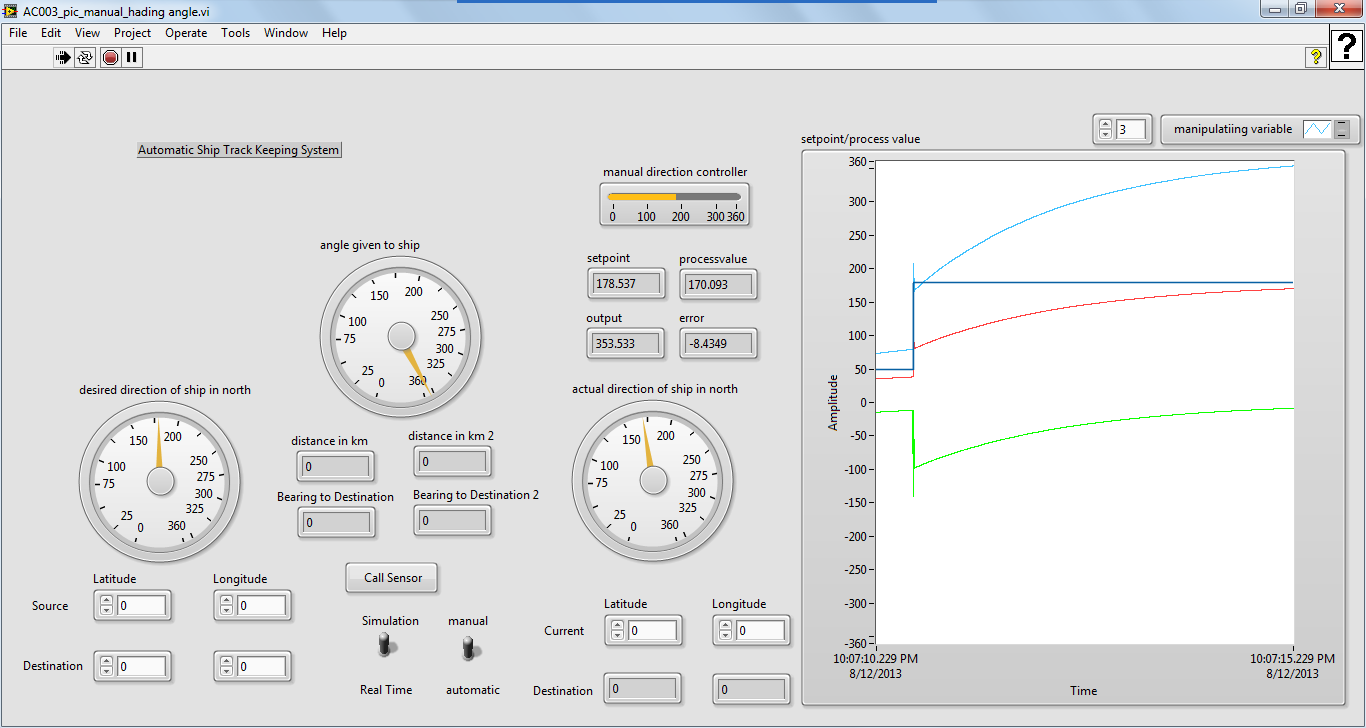
Project Title: Automatic Ship Track Keeping System
Hardware & Software Used:
hardware- ni-daq 6008
arduino microcontroller
GPS
compass
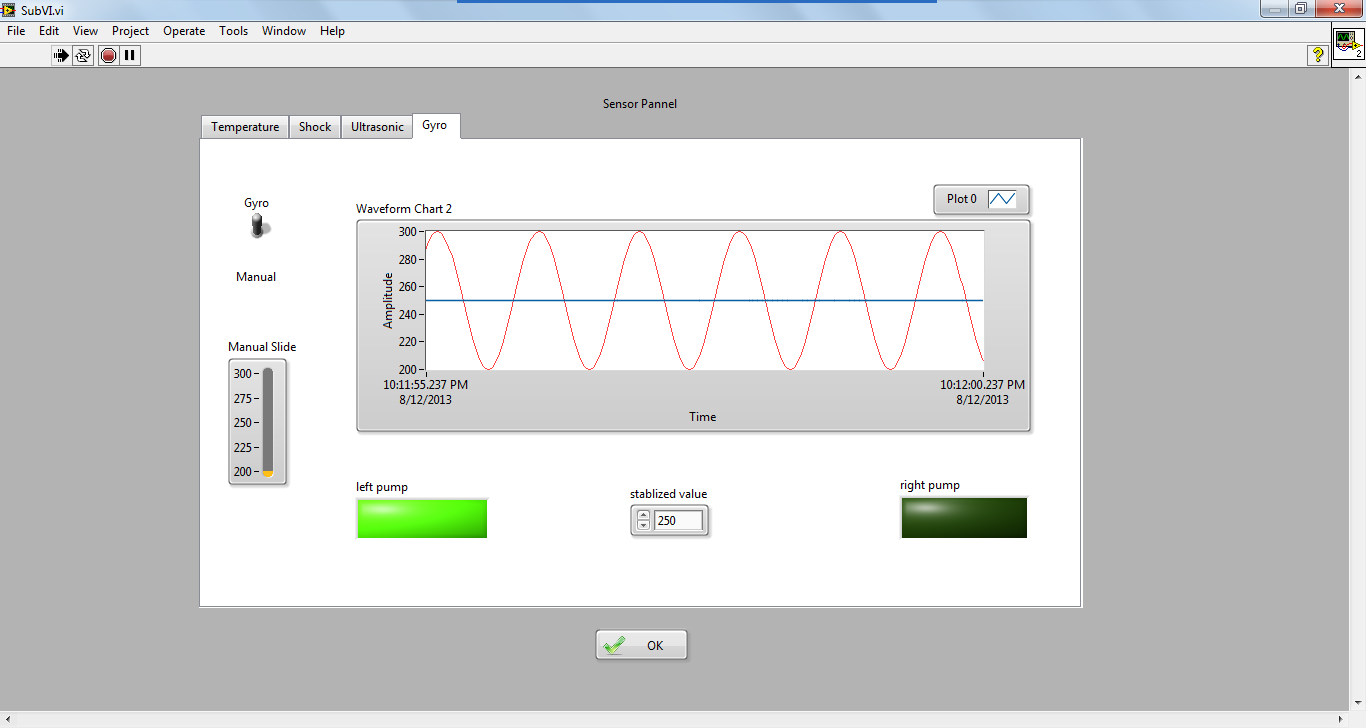
gyro sensor
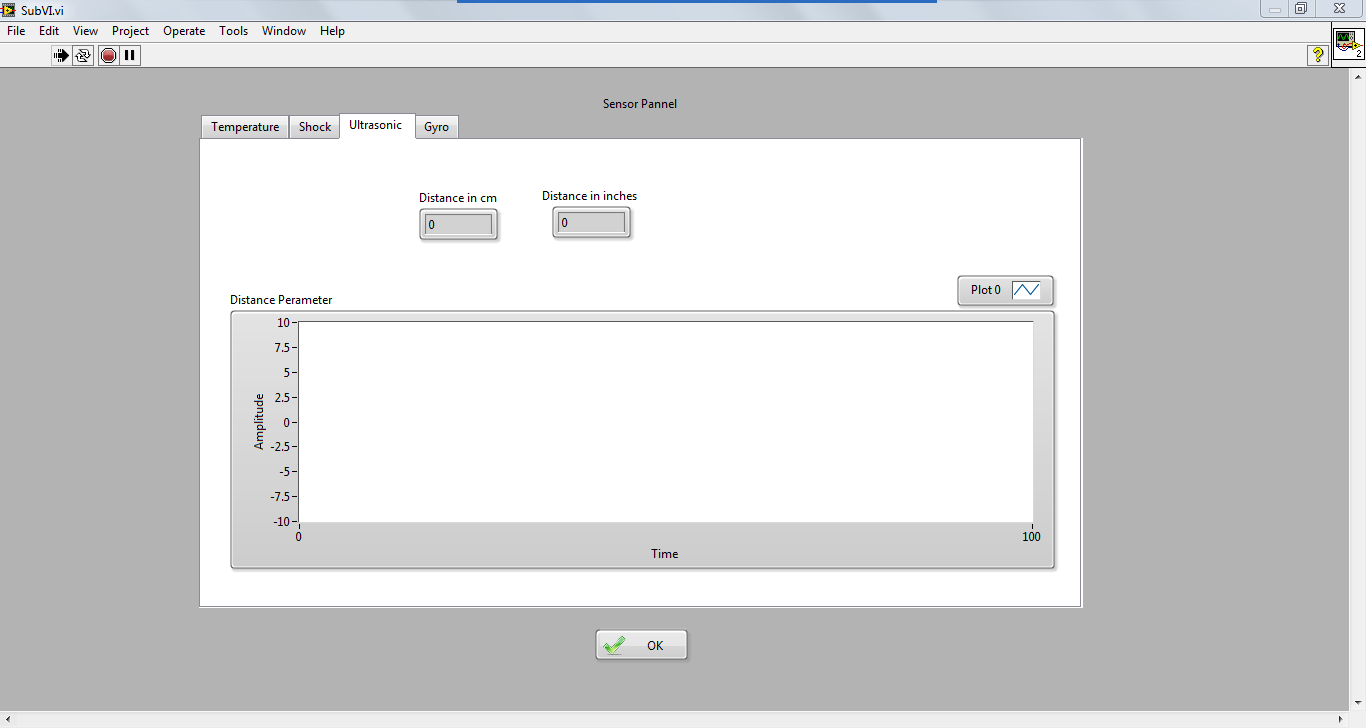
ultrasonic sensor
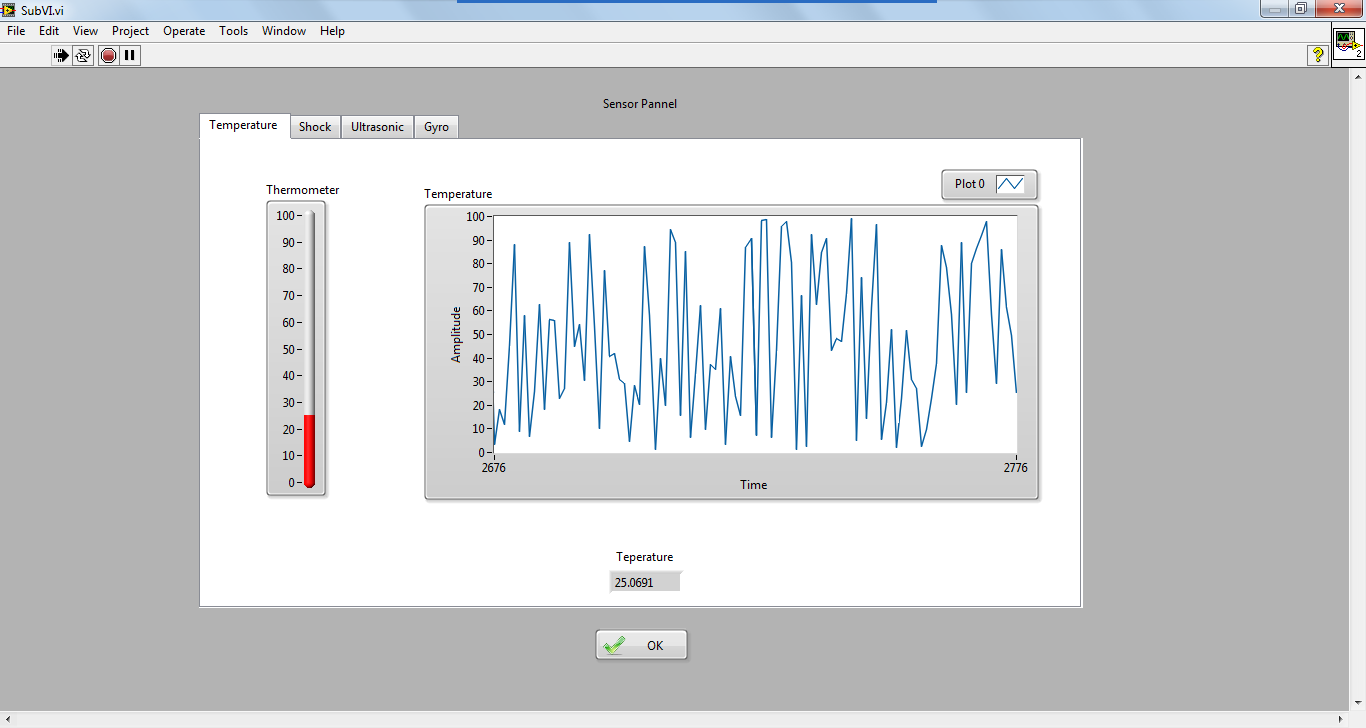
temperature sensor
shock sensor
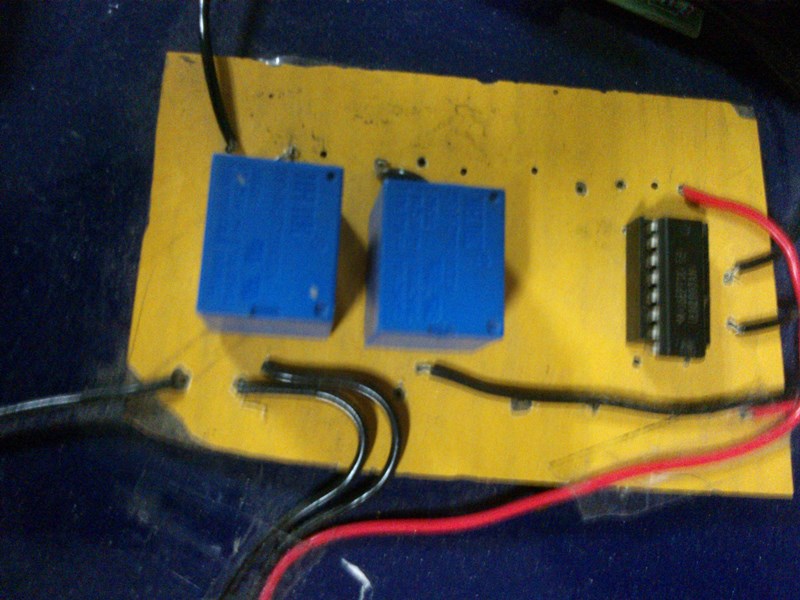
relays
uln2003
dc motors
servo motor
software- ni- labview 2012
ni- daq driver
ni- vision and aquasition tool
ni- control and simulation tool
What challenge/problem are you trying to solve through your application:
For the track-keeping problem, the maneuver of way-point turning and ship guiding through a complex path
(trajectory) are presented. The influence of sea current and wave disturbances on track-keeping creates problem.
How does your application solves the above mentioned challenge/problem:
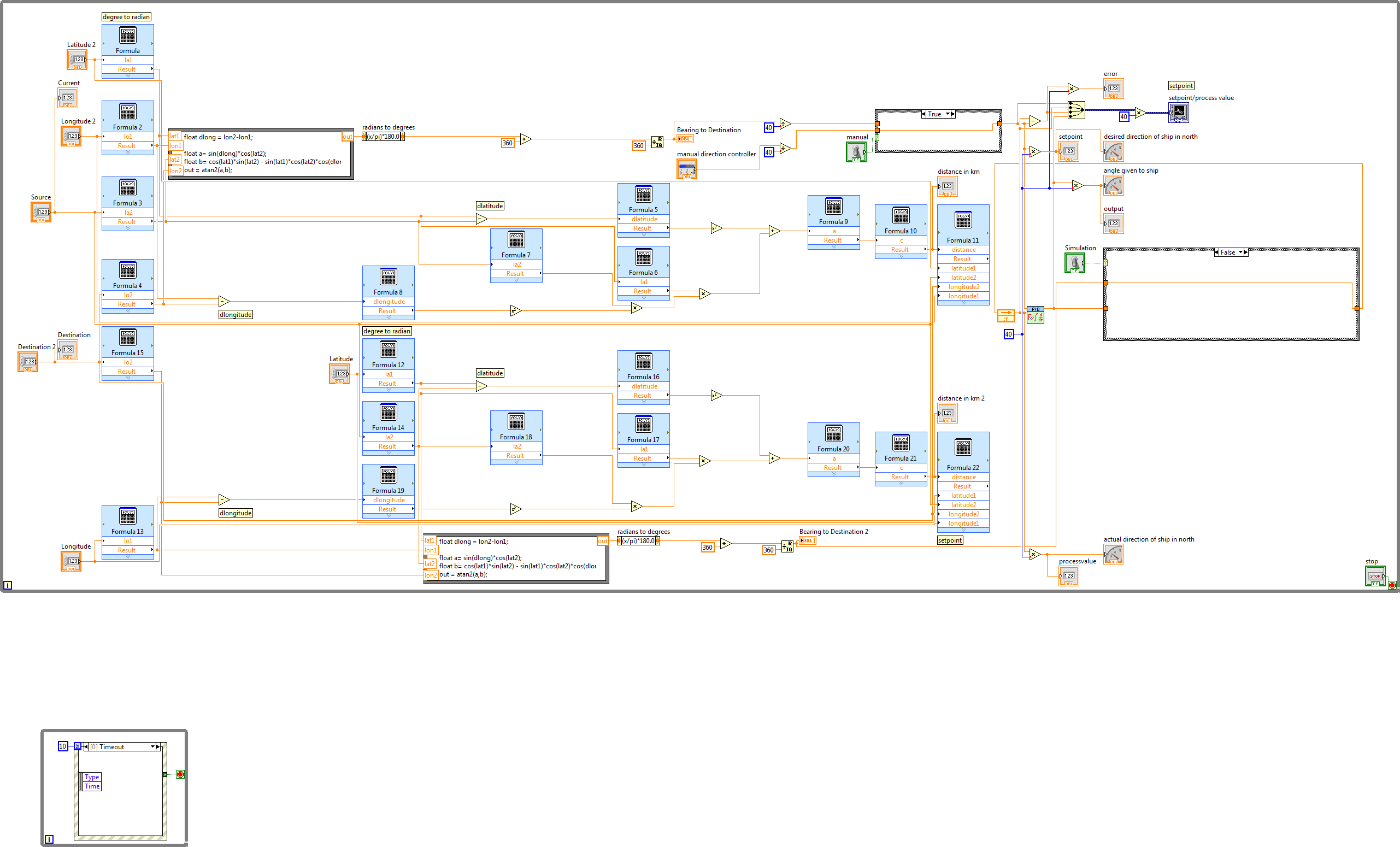
An improved strategy for an intelligent control method is developed using PID autopilot so as to measure the angle between source and destination(bearing angle), according to which the ship tracks the path based on the current location of the ship. The influence of various factors, like wave disturbances, winds, currents on track keeping was taken into consideration. The analytical part of the system is based on the comparison between angle of source and that of the current location of the ship. The results of the simulation experiments, providing a valid proof to the whole research, are mathematically better than the traditional method of Ship control system.
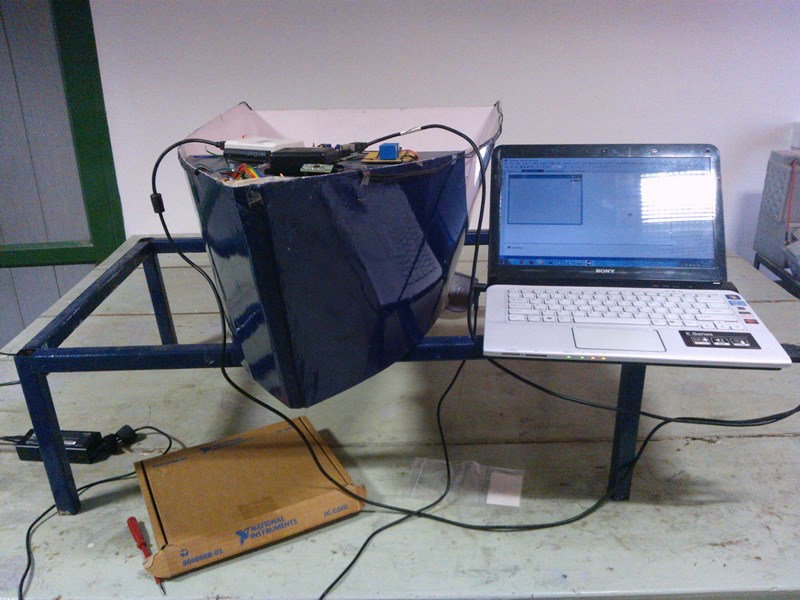
Description of Project:
This project contains mainly two mode of operations, one is automatic and second is manual. In the automatic mode, we are using PID controller, firstly we are calculating bearing angle from longitude and latitudes of source and destination. This baring angle becomes our setpoint and was given to PID controller. The output of PID was given to the servo motor which provides the heading angle to ship same as our setpoint. Now the feed back mechanism was introduced by using gps and compass which provides bearing angle of current location, this bearing angle is said to be process value. By comparing setpoint and process value we can evaluate error. Our controller works on that error which will be vanished further. In this manner our ship will keep its track. In the manual mode, operator can control the ship by manipulating the bearing angle manually.
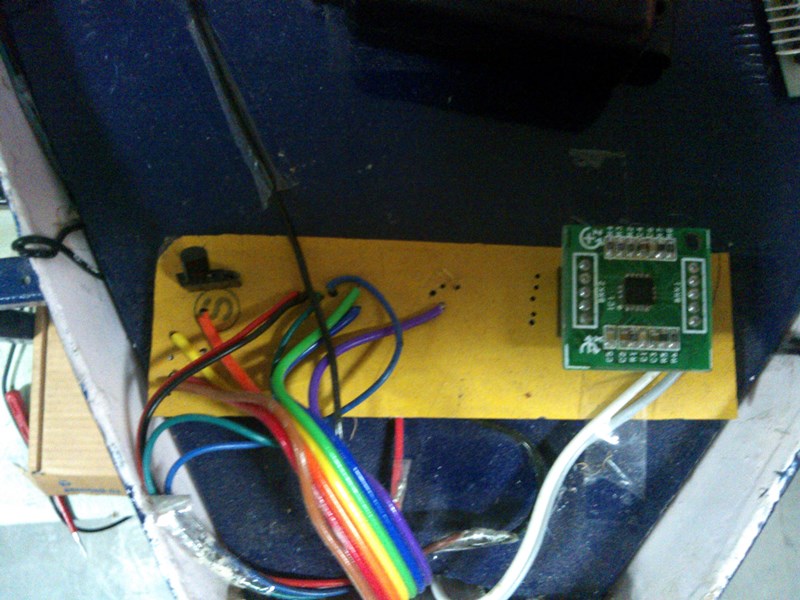
There ane many sensors like gyro sensor, ultrasonic sensor, temperature sensor, shock sensor which makes our ship more stable under the influence of various factors, like wave disturbances, winds, currents.
There are pumps which are controlled by gyro sensor under the bad weather.
Insert Images Here:





YouTube Link of Video:
Insert the Video here:
video is attached below.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
gud work done on tracking system
hope this project will lead you to beyond its limit
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
gr8 work done by Mr sudhanshu khare on ship track keeping system.. hats off to u sir
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
GREAT AND INNOVATIVE WORK SUDHANSHU. 
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
gud1 sir ji......
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
excellent job.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Great Job Done Sudhanshu ! really appreciable...:)
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Please ensure you have also filled the form (http://natinstindia.com/national_instruments/NIYantra-2013-Round2.html ) and completed the submission process. Ignore this if you have already filled this form.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
great work...
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
gr8 work sir
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Excellent work from a genius..well done sir!!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
nice work
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
I have talked this guy, he was the only student, who gave a lot of efforts, now day have come to take REWARD of his labour & efforts..... Best of Luck..
Saurabh Agarwal
E.C.E.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Awesome
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Awesum .... .
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
So Awesome , You give me pisson to do one like this for QuadCopter
