Hey everyone
Im using the quadrature encoder dx model given by NI examples to calculate my motor speed and posion. The way I used it is just same as in the example except that my encoder has different number of pulses each revolution. Now I have a problem is that this model I used everytime I stop my prgram and run it again the postion resart from 0 or from +-1/(CPR*4). However I need to know the absulote postion of my rotor to algin my rotor with stator. Any one knows how I can do this?
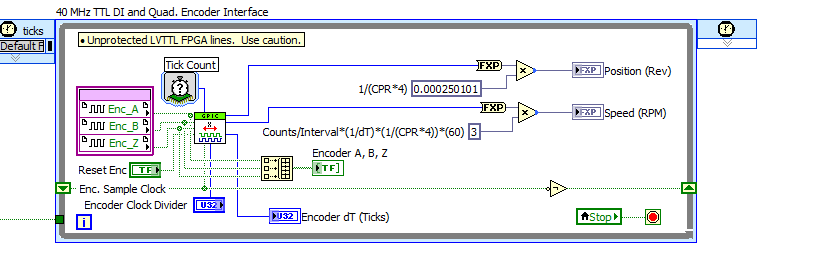
after some testing i feel like in the RIO quadrature core model there is a logic that making the postion reset only occurs when the first Z pulse comes in. I assume if I changed that to making the reset occurs every time the Z comes in, then making the Z signal as my reference 0 postion , this way i can get my rotor postion regaring to my 0 postion.
I hope someone can disscuss it with me
Thank you very much
Looking forward reply
{kind=link}
