- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
UC Berkeley: Star Wars BB-8 Droid
Contact Information
Competition Year: 2016
University: University of California, Berkeley
Team Members: David Cuban, Aditya Desai, Isaac Finger, Lane Fuller, Sean Kelley, Dominik Soesser
Faculty Advisors: George Anwar, Liwei Lin
Email Address: lanegfuller@berkeley.edu
Submission Language: English
Project Information
Title: Star Wars BB-8 Droid
Description: Spherical drive robot, inspired the BB-8 droid seen in Star Wars: Episode 7, The Force Awakens.
Products:
NI myRIO
NI LabVIEW 2015
LabVIEW Real-Time Module 2015
The Challenge:
As a group of Mechanical Engineering seniors at the University of California, Berkeley, we formed Sphira Robotics in order to create a spherical drive robot, inspired by the BB-8 droid seen in Star Wars: Episode 7, The Force Awakens. This task provided several unique control, stabilization, and design challenges. Our company features members with diverse skillsets, and we are confident that with our combined talent we can deliver a robot that not only pays homage to the movie, but also becomes a technical achievement with real and practical applications. Our aim is to build a robot adept at exploration, given that its unique drive system it can maneuver in any direction on the X-Y plane.
The Solution:

Figure 1: Completed Robot
In order to solve this very interesting and complicated design challenge, we decided to create a holonomic drive system that uses four independently powered omni-directional wheels. A diagram of such a system is shown in Figure 2.
Figure 2: Diagram of a Holonmic Drive System
After much discussion on the dynamics of the system and on motor selection, we decided to place the holonomic drive system inside the the sphere as shown in Figure 3. A more detailed discussion can be found in the report attached.
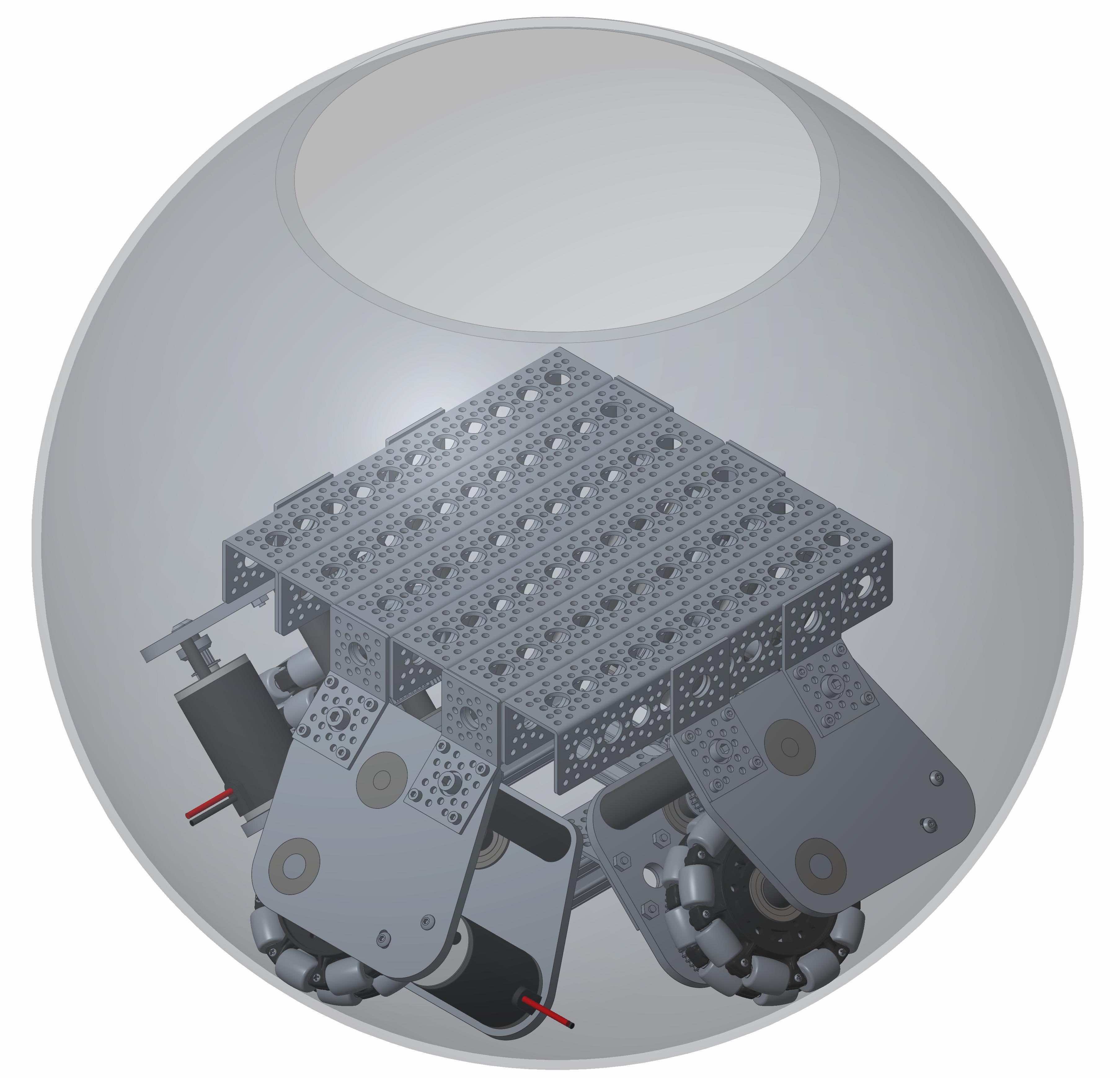
Figure 3: CAD of Holonomic Drive System
Next, we decided to use the NI myRIO as the brain for our robot because of its Real-Time and Multitasking capabilities. We used it to read instructions from an RC remote controller, read the data from the onboard accelerometer for stabilization, and then communicate this information to the four motors. An electrical schematic of our robot is shown in Figure 4.

Figure 4: Wiring Diagram
Finally, here is a video demonstration of our final product. Make sure to read the attached final report and the highlighted LabVIEW code for more information about our project. Thank you and enjoy!
