- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator

Overview
myFlightDataRecorder is a myRIO powered Data Acquisition, Display & Logging system aimed at recording data typically useful for flying aircraft. The project Uses the MXP, AI/O, DI/O DAQ facilities and combines this with the RT OS and FPGA functionality that the myRIO has to offer.
myFlightDataRecorder has the support of communication to a host via WIFI as well as the option for an embedded web published front panel for ease and flexibility of viewing the data. myFlightDataRecorder offers an accurate, reliable way of viewing data during flight as well as being traceable and logged in the event of a crash.
Summary of Code
FPGA
The single FPGA VI contains code that logs the accelerometer data and Audio data to temporary memory and sends this data to an RT VI via a DMA FIFO. If the FPGA code detects a level of acceleration over a specific limit (i.e when a crash happens) the FPGA code writes all of the recorded data to another set of FIFO's and then in turn to a TDMS file on the RT.
RT
The RT VI that logs the accelerometer data sends the live FPGA data to a host VI on the host PC via a combination of NSV's and Network Streams.
There is another main RT VI that has a few dependednt sub-VI's, these VI's are responsible for taking in the GPS data via MXP serial ports and then parsing this data for specific GPS string values (GPGGA & GPRMC) which give data such as LAT, LON, Speed over ground, Altitude and Time. The GPS RT VI also builds a URL of a static google map and balloon placed on the current location to be sent to an ActiveX control. All these values are stored in a network stream as well as NSV's to be sent to the host VI.
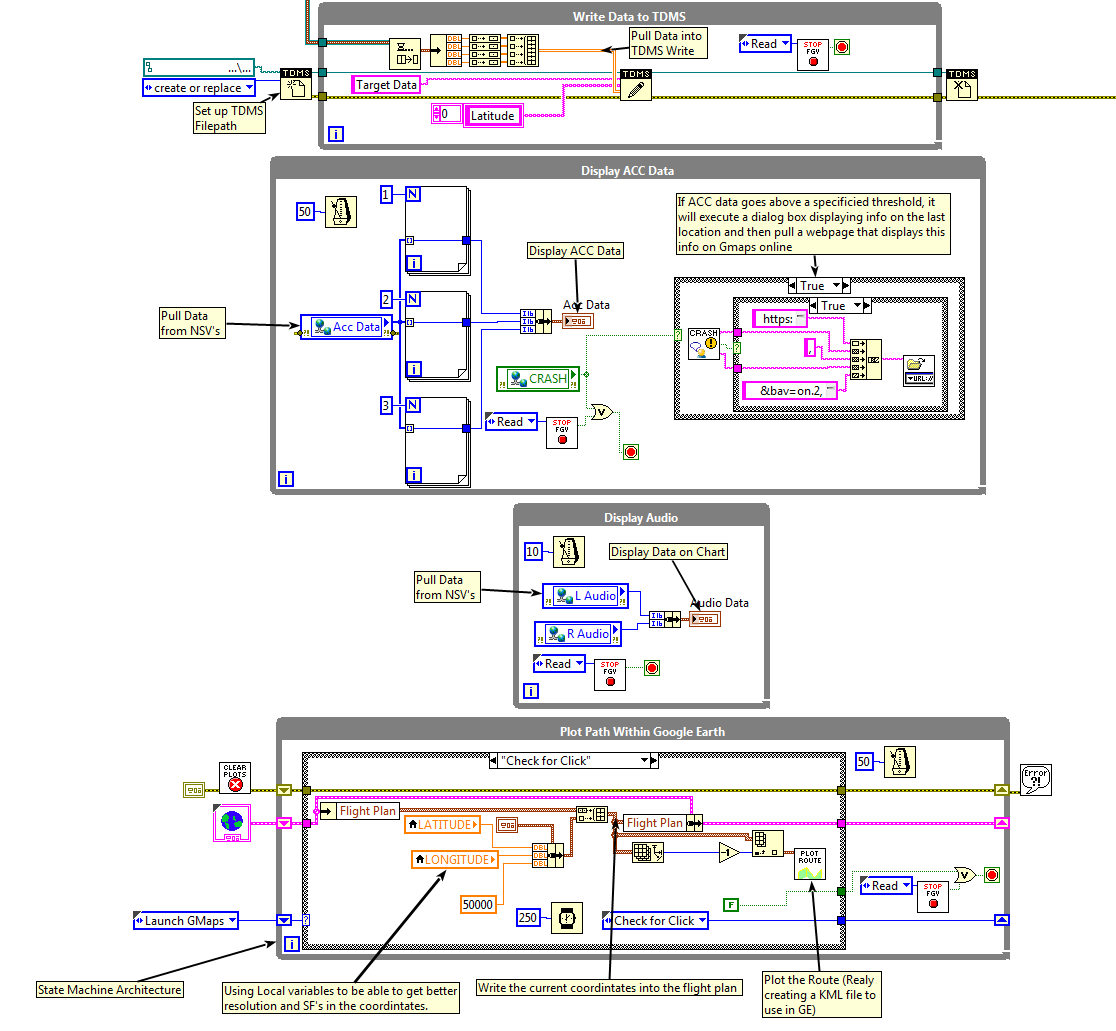
Host
The Host VI is where the main documentation and display of the data takes place. The Front Panel allows for the display of Accelerometer data, Audio Data, Altitude & Speed as well as integrating ActiveX to pull a static map of the current location with a Blue balloon representing the current location based on the LAT/LON values parsed from the RT GPS VI. The FP also allows for the map to be changed to sattelite, roadmap or hybrid as well as zooming in or out, this is done by communication to the RT VI via NSV's.
As well as displaying the data on a LV FP, there is also integration with Google Earth using an API that allows for a traceable route to be plotted on every iteration/change in the LAT/LON values. This in combination with the static map give the flexibility of a traceable location.
As an added safety feature, the Host VI also incorporates a dialog box pop up which when either a connection is lost to the RIO or if accelerometer data is over the specified limit, alerts the user to a potential crash and the last known location of the device, this then on the press of the OK button directs your default browser to a google maps page highlighting the last known location.
Requirements
Software
- LabVIEW 2014
- 2014 RIO Drivers
- 2014 RT
- 2014 FPGA
- SiRF Demo SW (To test GPS)
Hardware
- NI myRIO
- GlobalSat EM-506 GPS Receiver (Or Equivalent)
- GPS to MXP Connector Ribbon
- 12V Battery PSU or Mains Power Supply
Setting Up & Running the System
- Open the File ‘MyFlightDataRecorder’
- Open the project ‘myFlightDataRecorder.lvproj’
- The Project Explorer should look like:
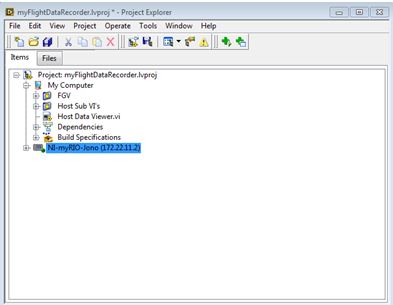
5. Right Click the myRIO and select ‘Connect’
6. The myRIO should look like:

7. Expand the myRIO to show the following:
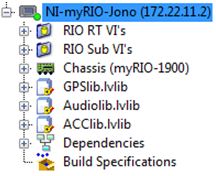
8. Ensure the RT VI’s are working by opening them both and running them
9. Open ‘Host Data Viewer.vi’
10. Ensure that connection is made between the RIO & GPS & PC
11. Ensure that the red LED on the GPS is flashing (Solid mans no connection to GPS satellites)
12. Press the ‘Acquire Flight Data’ button to run the VI
Accessing recorded data
Accessing the RT TDMS data
The system stores the Audio & Accelerometer data to the RT host. Follow these steps to access it:
- Open Windows Explorer
- Enter ‘ftp://xxxxxx’ where xxxxxx is the IP address of the myRIO
- Navigate into ‘Home’ ‘admin’ ‘lvuser’ ‘natinst’ ‘labVIEW Data’ ‘bin’
- The TDMS files that are of use are ‘ACCDATA’ & ‘VOICEREORDING’
- Download these & open in DIAdem:
Accessing the Host TDMS data
The system stores position, altitude and speed data to the host pc as a TDMS file. Follow these steps to access it:
- Navigate the project folder
- The TDMS file is contained in the project folder and is called ‘Position_Alt_Speed_Data.tdms’
- Download these & Open in DIAdem
About the Developer
My Name is Jonathan Hird, I am currently an Applications Engineering Intern at National Instruments UK as part of my studies at Sheffield Hallam University where I am studying towards a BEng in Electrical & Electronic Engineering. As part of my Internship, I completed this project over the course of 1 week (with a couple of days work at home 'tidying' the architecture), hopefully this demonstrates the ease of developing systems using NI Hardware and Software. This was a great opportunity for me being an avid LabVIEW/DIAdem programmer as well as being a Certifed LabVIEW Associate Developer (CLAD).
Additional Images or Video
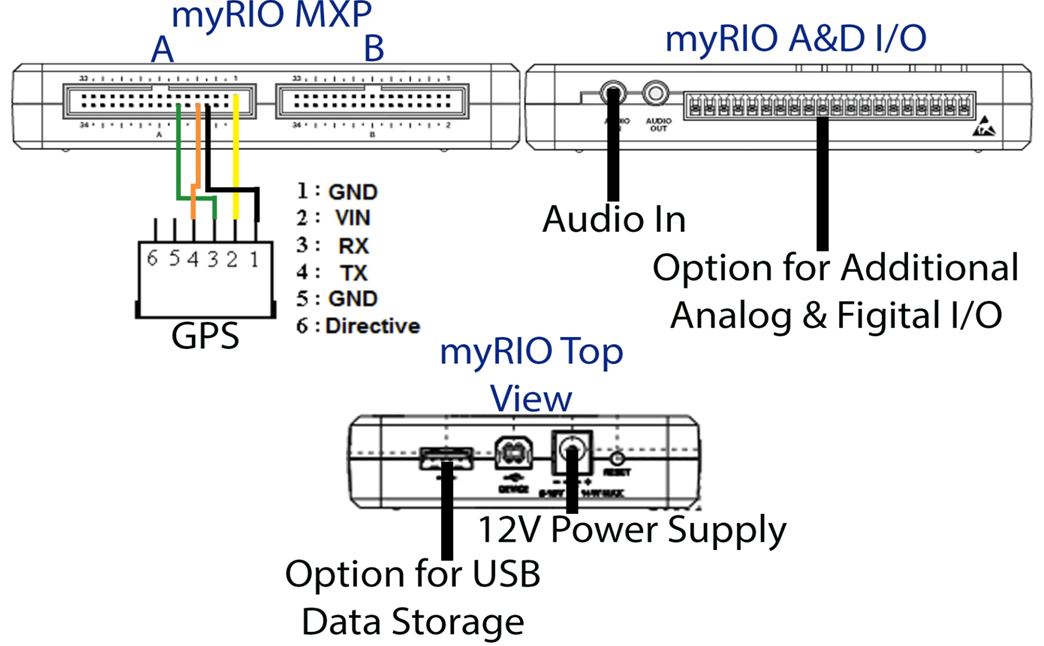
Connection Diagram
Host Front Panel
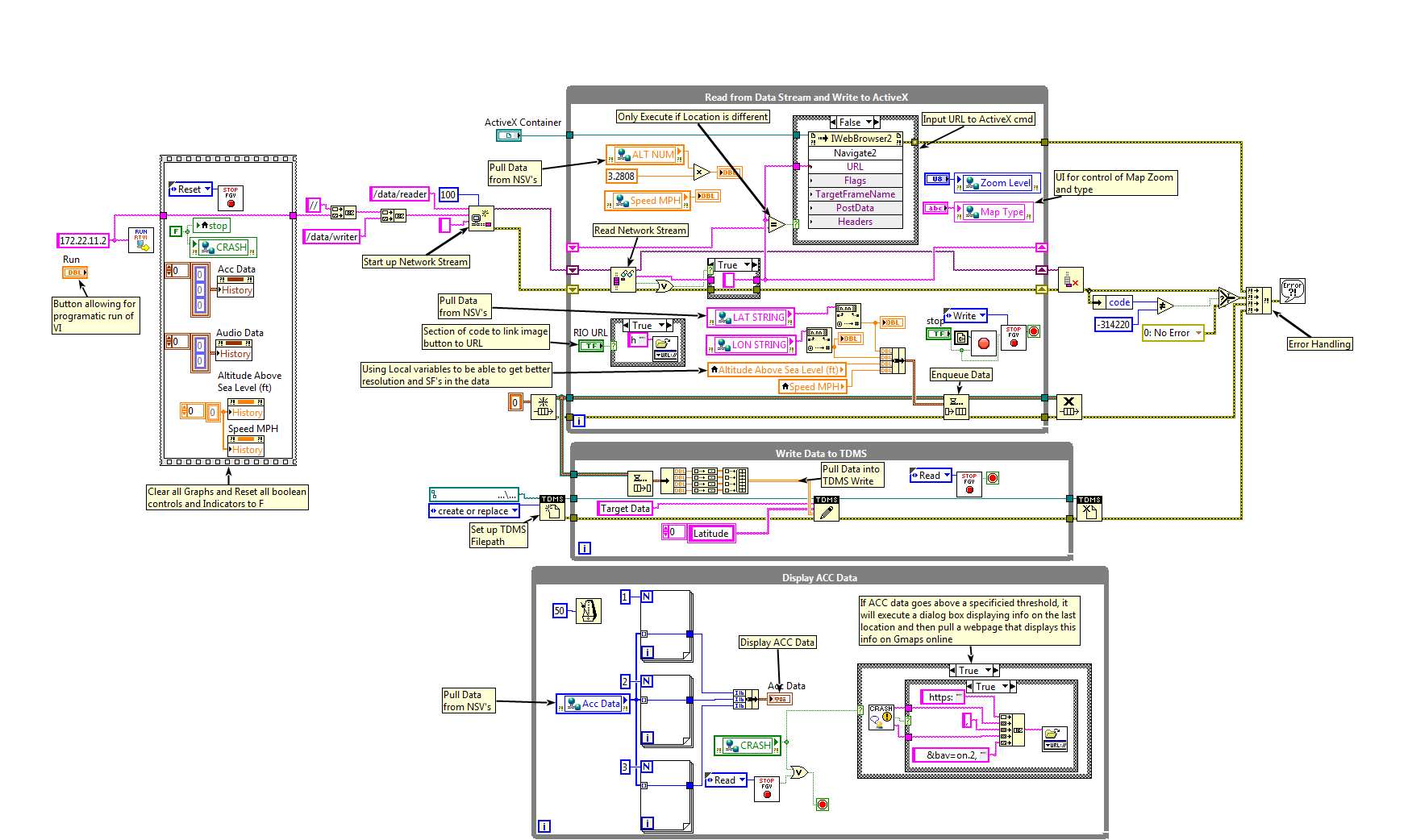
Host Block Diagram
Attached Documentation
- Full Instructions
- Zip file containing the Project & associated VI's
