- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
stepper motor # of steps - 32767
08-23-2013 12:44 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Hello, Im running LIFA stepper motor example on an easy driver. When I run the motor , the maximum number of steps I can give is 32767. Any higher number , and the VI would automatically change it to this. I did some searching and saw that's because of 'closed loop stepper control'. I haven't got an idea what this is and would really appreciate if someone can give me an idea as to what I should do to fix it.
Thank you
08-24-2013 01:52 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
The "# of Steps to Move" input is a 16-bit signed integer so has a max value of 32767. This is simply the result of an early design decision for the Stepper Write VI.
There isn't a technical reason why you can't modify the VI and the firmware to both pass and accept and larger value. You'd need to split a 32-bit number into 4 bytes and pass those into the Send Receive VI. Then modify the Arduino firmware to reconstruct the 32-bit number on the other side.
Have fun!
08-27-2013 10:11 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Thank you Fred. But I do not have much of an idea how to do it. Could you possibly explain it more or point me to any helpful resource.Thanks again !!
08-27-2013 04:11 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
I haven't tested this in the slightest, but I'll illustrate what I was describing before.
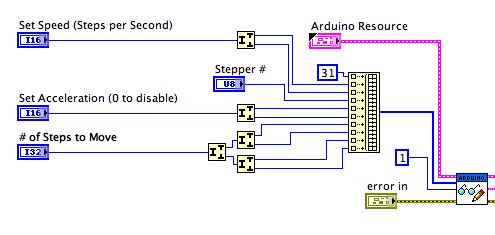
First, modify the Stepper Write VI to move the Set Acceleration control to the inputs below the Stepper # control (eventual command arrary indexes 5 & 6).
Second, change the # of Steps to Move control to a I32 representation, split it into 4 bytes, and wire to the next four array inputs (eventual command array indexes 7, 8, 9, & 10)
Third, change the AccelStepper_Write function (within <vi.lib>LabVIEW Interface for Arduino\Firmware\LIFA_Base\LabVIEWInterface.ino) to expect a 32-bit value for Steps to Move:
// Stepper Functions
#ifdef STEPPER_SUPPORT
void AccelStepper_Write(unsigned char command[]){
//int steps = 0;
long steps = 0;
int step_speed = 0;
int acceleration = 0;
//Speed is a 16 bit value, split for data transfer. Reassemble 2 bytes to an int 16
//Steps is a 32 bit value, split for data transfer. Reassemble 4 bytes to an int 32
//steps = (int)(command[5] << 8) + command[6];
steps = ((long)command [7] << 24) | ((long)command [8] << 16) | ((long)command [9] << 8) | ((long)command [10]);
step_speed = (int)(command[2] << 8) + command[3];
//acceleration = (int)(command[7] << 8) + command[8];
acceleration = (int)(command[5] << 8) + command[6];
steppers[command[4]].setMaxSpeed(step_speed);
Good luck!
08-27-2013 09:06 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Thanks a lot Fred. I'll try this out !!
